Frontiers Gait Optimization Method for Humanoid Robots Based on
4.5 (469) · $ 33.50 · In stock

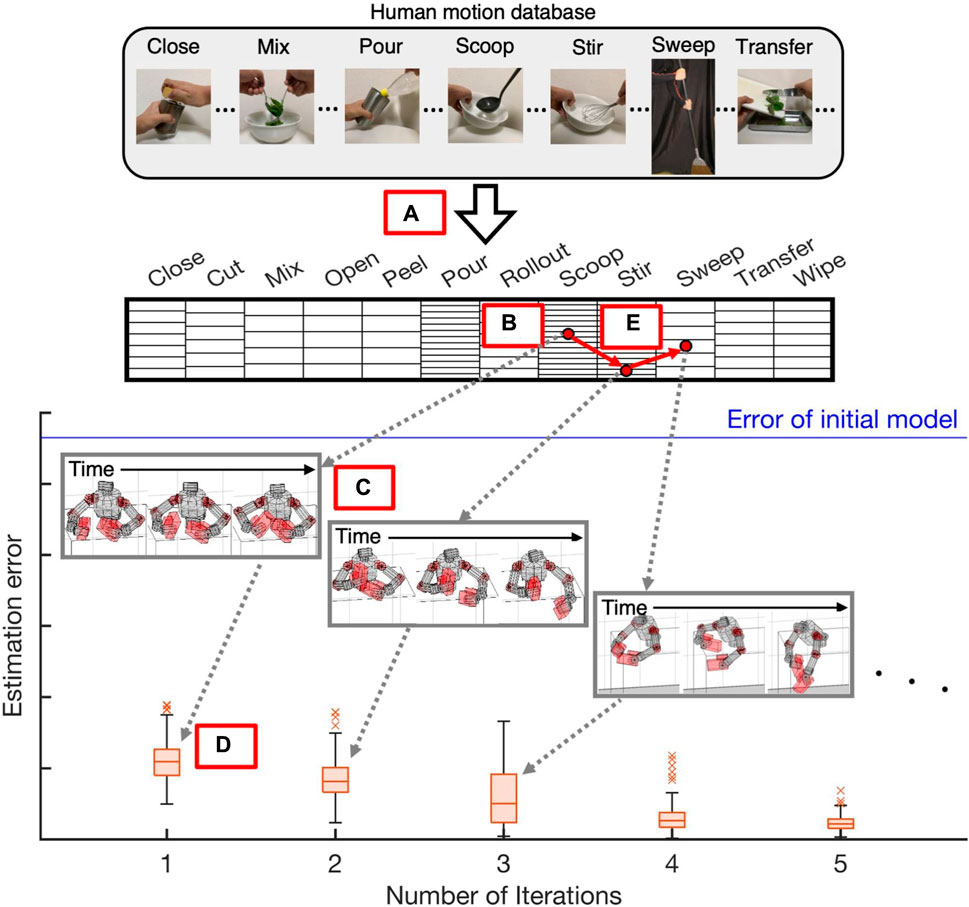
Frontiers Curriculum-based humanoid robot identification using
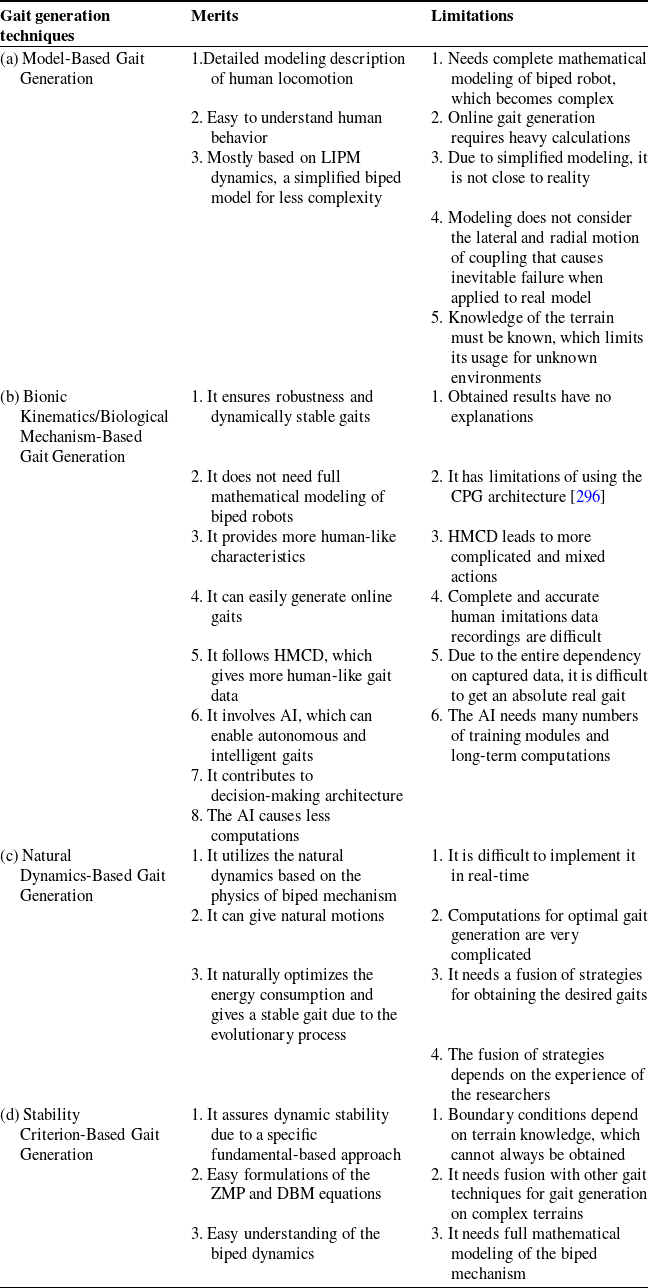
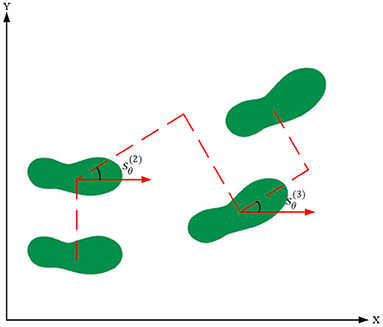
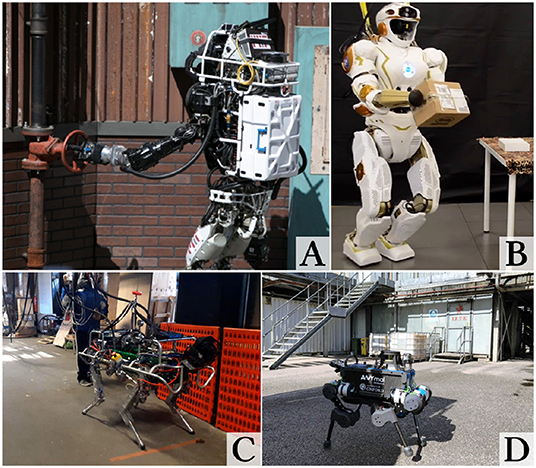
A review on gait generation of the biped robot on various terrains

Figure 1 from Bipedal Hopping: Reduced-Order Model Embedding via
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Pronto: A Multi-Sensor State Estimator for Legged

PDF) Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on

Frontiers Design Optimization for Rough Terrain Traversal Using
Frontiers Inertial sensors for gait monitoring and design of
Applied Sciences, Free Full-Text
Frontiers Gait Optimization Method for Humanoid Robots Based on
You may also like






Related products





© 2018-2024, dannyfit.de, Inc. or its affiliates