Applied Sciences, Free Full-Text
4.6 (91) · $ 9.50 · In stock
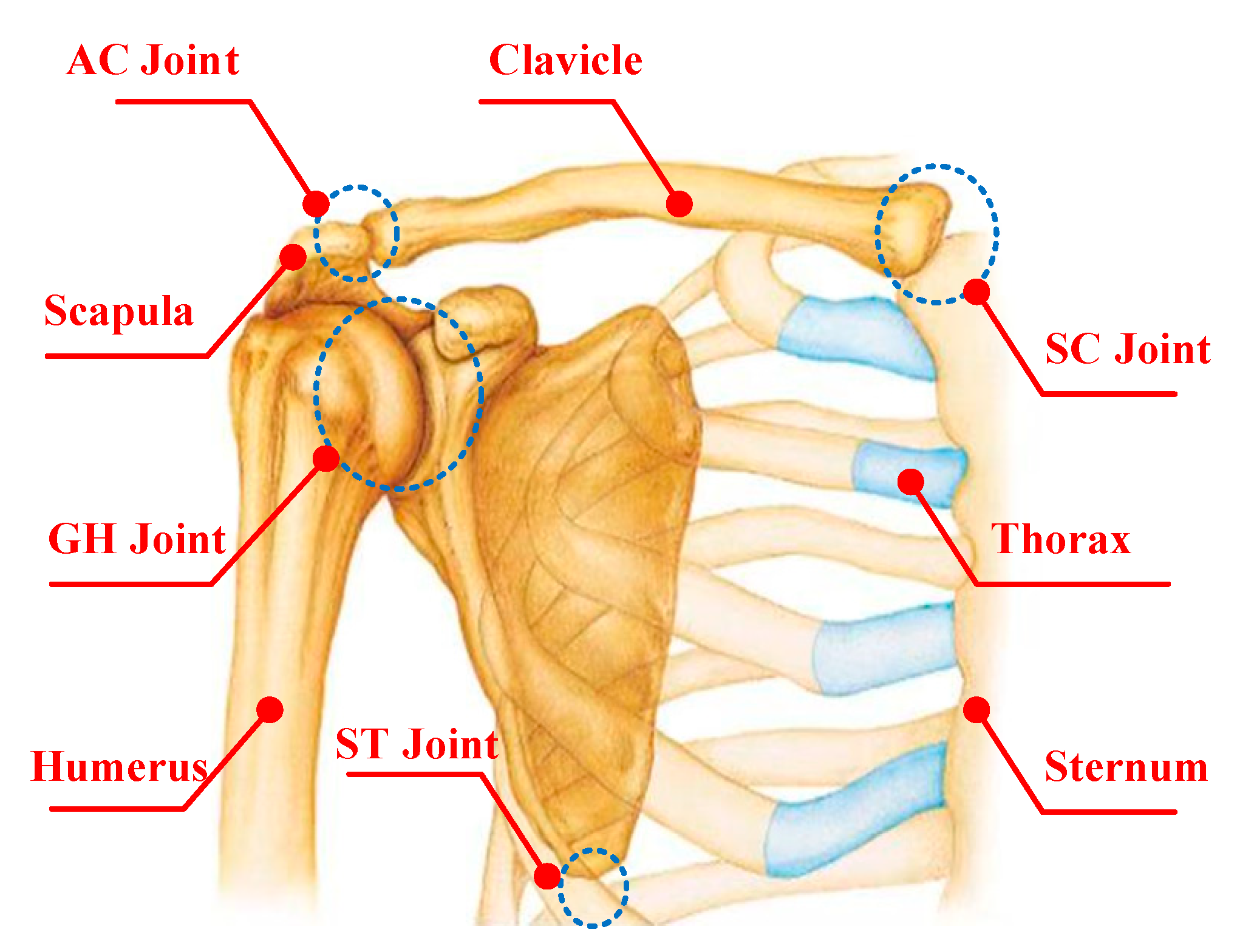
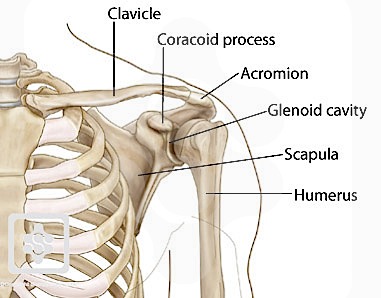
Due to the complex coupled motion of the shoulder mechanism, the design of the guiding movement rules of rehabilitation robots generally lacks specific motion coupling information between the glenohumeral (GH) joint center and humeral elevation angle. This study focuses on establishing a kinematic model of the shoulder complex obtained from a wearable detection system, which can describe the specific motion coupling relationship between the GH joint center displacement variable quantity relative to the thorax coordinate system and the humeral elevation angle. A kinematic model, which is a generalized GH joint with a floating center, was proposed to describe the coupling motion. Twelve healthy subjects wearing the designed detection system performed a right-arm elevation in the sagittal and coronal planes respectively, and the motion information of the GH joint during humeral elevation in the sagittal and coronal planes was detected and quantized, with the analytical formulas acquired based on the experimental data. The differences in GH joint motion during humeral elevation in the sagittal and coronal planes were also evaluated respectively, which also verified the effectiveness of the proposed kinematic model.
Social Sciences, Free Full-Text, press f to pay respects juego
Applied Sciences, Free Full-Text, ray manchester x reader

Applied Sciences, Free Full-Text, g1 f1500
PDF) How to automatically turn patient experience free-text

Applied Sciences, Free Full-Text
Applied Sciences, Free Full-Text, groups moodle ufsc
Applied Sciences, Free Full-Text, draw speed coil forbidden west

Lusaka Institute of Applied Sciences. LIAS.

American Journal of Applied Sciences
Find VA Research Articles and Projects in PubMed Central and NIH
Applied Sciences, Free Full-Text, twitter codes project ghoul

Applied Sciences, Free Full-Text, shotgun king igg

Applied Sciences, Free Full-Text
PDF) Invitation to Workshop on Functional Materials Science and

Applied Sciences, Free Full-Text, define empathetic